歡迎進入廈門欣仰邦科技有限公司官網!
0592-3564822


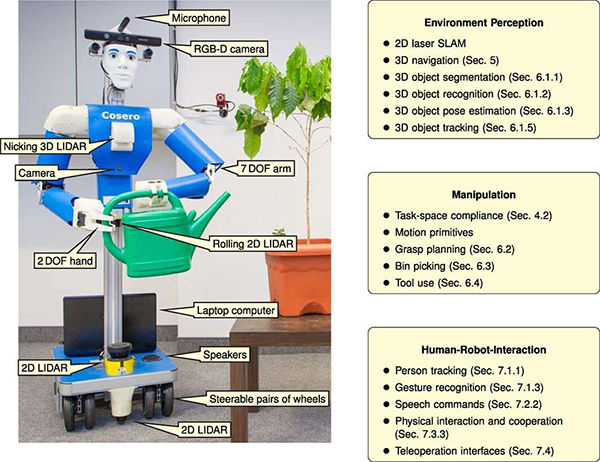
工業機器人開始應用大量傳感器,以便在工業自動化過程實現良好的操作與控制,例如協作機器人整合了力矩傳感器和攝影機,以確保最佳視角與安全性。工業機器人還整合了哪些傳感器?
在工業物聯網(Industrial IoT)、擴增實境(AR)、云端運算等技術熱潮下,全球制造企業紛紛開始建設智慧工廠,以實現自動化、資訊化和智慧化的工業制造。其中,工業機器人將成為這一智慧制造轉型的重要組成部分。傳感器是實現工業機器人的核心技術之一,讓機器人能夠和人類一樣選擇路徑、感知環境變化以及在復雜的情況下作出正確判斷。特別是在工業自動化領域,機器人需要傳感器提供必要的資訊,以正確執行相關的復雜的操作。根據市場預測,到2021年,全球工業機器人傳感器市場將以約8%的復合年成長率(CAGR)穩步成長。對于包括消費者和汽車在內的機器人感測應用,另一份報告明確指出,到2027年,視覺系統將單獨成就57億美元的市場,力傳感器市場將超過69億美元。工業機器人正開始應用大量傳感器以確保在工業自動化過程實現良好的控制與操作,例如協作機器人整合了力矩傳感器和攝影機,除了提供更好的視角,也保證工作區域的安全等。此外,工業機器人還整合了哪些傳感器?
智慧工廠的要角——工業機器人
機器人自動化是一項快速進步的技術,在短短幾十年的時間里,工業機器人已經在全世界范圍內變成工廠里普通的裝置。工業機器人是自動執行工作的機器裝置,它既可以接受人的指揮、執行預先編排的程式,也可以根據以人工智慧(AI)技術定義的指令行動。此外,它還可以克服惡劣環境對生產的影響,減少人工的使用,保障工人的安全,同時幫助工廠節約生產成本,提高生產效率,從而保證產品品質。
工業機器人是多自由度的機器裝置,能自動執行工作,按照自身動力和控制能力來實現各種功能,由機械、感測與控制等三大部分組成,這三大部分又分成六個子系統。分別為:
驅動系統:為每個關節即每個運動自由度安置傳動裝置,使機器人運動起來。機械結構系統:由機身、手臂、末端操作器三大件組成。每一大件都有若干自由度,構成一個多自由度的機械系統。手臂一般由上臂、下臂和手腕組成。末端操作器是直接裝在手腕上的一個重要部件,可以是兩手指或多手指的手爪,也可以是噴漆槍、焊槍等。感測系統:獲取內部和外部環境狀態中有意義的資訊,提高了機器人的機動性、適應性和智慧化水準。機器人-環境互動系統:實現機器人與外部環境中的設備相互聯系和協調的系統。
人機互動系統:人與機器人進行聯系和參與機器人控制的裝置。
控制系統:根據機器人的作業指令程式以及從傳感器反饋回來的訊號,支配機器人的執行機構去完成規定的動作和功能。
工業機器人常用的傳感器
工業機器人最常用到的傳感器包括二維視覺傳感器、三維視覺傳感器、力/力矩傳感器以及碰撞檢測傳感器。

二維視覺傳感器:二維視覺是一個可以執行從檢測運動物體到傳輸帶上零件定位等多種任務的攝影機。許多智慧相機都可以檢測零件并協助機器人確定零件的位置,機器人可以根據接收到的資訊適當調整其動作。
三維視覺傳感器:三維視覺系統必須擁有兩個不同角度的攝影機或雷射掃描器,用以檢測物件的第三維度。例如,零件取放便是利用三維視覺技術檢測物體并創建三維影像,分析并選擇最好的拾取方式。
力/力矩傳感器:如果說視覺傳感器給了機器人眼睛,那么力/力矩傳感器則給機器人帶來觸覺。機器人利用力/力矩傳感器感知末端執行器的力度。多數情況下,力/力矩傳感器位于機器人和夾具之間,這樣,所有回饋到夾具上的力都在機器人的監控之中。有了力/力矩傳感器,裝配、人工引導、示教、力度限制等應用才得以實現。碰撞檢測傳感器:這種傳感器有各種不同的形式,其主要應用是為作業人員提供一個安全的工作環境,協作機器人最需要它們。
有些傳感器可以是某種觸覺辨識系統,透過柔軟的表面感知壓力,給機器人發送訊號,限制或停止機器人的運動。有些傳感器則直接內建于機器人中。有些公司利用加速度計回饋,還有些則使用電流回饋。在這兩種情況下,當機器人感知到異常的力度時,便觸發緊急停止,從而確保安全。
要想讓工業機器人與人進行協作,首先要找出可以保證作業人員安全的方法。這些傳感器有各種形式,從攝影機到雷射等,目的是告訴機器人周圍的狀況。有些安全系統可以設置成當有人出現在特定的區域/空間時,機器人會自動減速運行,如果人員繼續靠近,機器人則會停止工作。最簡單的例子是電梯門上的雷射安全傳感器。當雷射檢測到障礙物時,電梯門會立即停止并退回,以避免碰撞。
適于不同的應用的其他傳感器
市場上還有很多傳感器適用于不同的應用。例如焊縫追蹤傳感器,以及觸覺傳感器也越來越受歡迎。這類傳感器一般安裝在抓手上,用來檢測和感覺抓取的物體是什么。傳感器通常能夠檢測力度并得出力度分布的情況,從而知道物件的確切位置,讓你可以控制抓取的位置和末端執行器的抓取力度。另外還有一些觸覺傳感器可以檢測熱量的變化。視覺和近接傳感器類似于自動駕駛車所需的傳感器,包括攝影機、紅外線、聲納、超音波、雷達和光達。某些情況下可以使用多個攝影機,尤其是立體視覺。將這些傳感器組合起來使用,機器人便可以確定尺寸,辨識物體,并確定其距離。
射頻辨識(RFID)感測可以提供辨識碼并允許得到授權的機器人獲取其他資訊。
麥克風(聲學傳感器)協助工業機器人接收語音命令并辨識熟悉環境中的異常聲音。如果加上壓電傳感器,還可以辨識并消除振動引起的雜訊,避免機器人錯誤理解語音命令。先進的演算法甚至可以讓機器人了解說話者的情緒。
溫度感測是機器人自我診斷的一部分,可用于確定其周遭的環境,避免潛在的有害熱源。此外,利用化學、光學和顏色傳感器,機器人能夠評估、調整和檢測其環境中存在的問題。對于可以走路、跑步甚至跳舞的人形機器人,穩定性是一個主要問題。它們需要與智慧型手機相同類型的傳感器,以便提供機器人的準確位置資料。在這些應用采用了具有3軸加速度計、3軸陀螺儀和3軸磁力計的9自由度(9DOF)傳感器或慣性測量單元(IMU)。
避障傳感器瞄準行動機器人
行動機器人需要透過傳感器即時擷取周圍的障礙物資訊,包括尺寸、形狀和位置資訊,來實現避障。避障使用的傳感器有很多種,目前常見的有視覺傳感器、雷射傳感器、紅外傳感器、超音波傳感器等。
超音波傳感器
超音波傳感器的基本原理是測量超音波的飛行時間,透過d=vt/2測量距離,其中d是距離,v是音速,t是飛行時間。
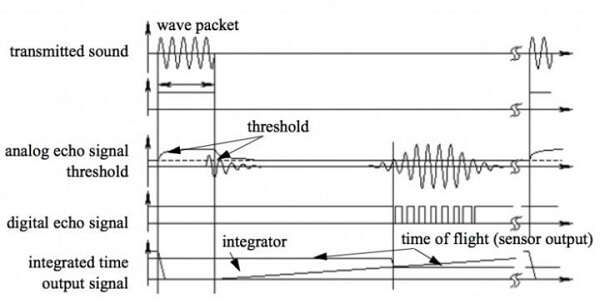
上圖是超音波傳感器訊號的一個示意。透過壓電或靜電變送器產生一個頻率在幾十kHz的超音波脈沖組成封包,系統檢測高于某閾值的反向聲波,然后使用測量到的飛行時間計算距離。超音波傳感器一般作用距離較短,普通的有效探測距離幾公尺,但是會有一個幾十毫米(mm)左右的最小探測盲區。由于超音波傳感器成本低、實現方法簡單、技術成熟,是行動機器人中常用的傳感器。
紅外傳感器
一般的紅外測距都是采用三角測距的原理。紅外發射器按照一定角度發射紅外光束,遇到物體之后,光會反向回來,檢測到反射光之后,透過結構上的幾何三角關系,就可以計算出物體距離D。
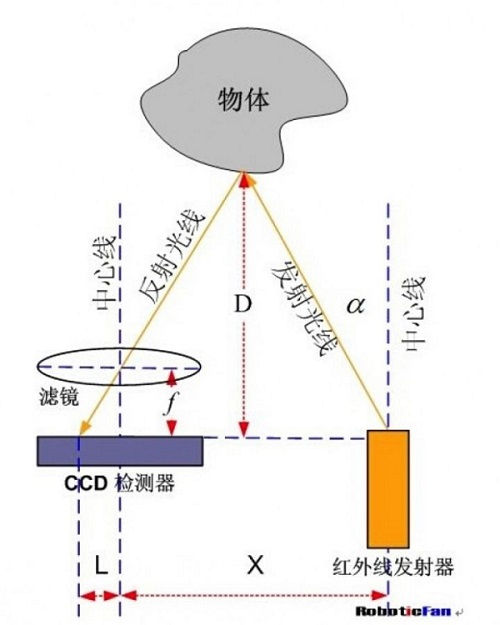
當D的距離足夠近的時候,上圖中L值會相當大,如果超過CCD的探測范圍,雖然物體很近,傳感器反而看不到了。當物體距離D很大時,L值就會很小,測量精度會變差。因此,常見的紅外傳感器的測量距離都比較近,小于超音波,同時遠距離測量也有最小距離的限制。此外,對于透明的或者近似黑體的物體,紅外傳感器是無法檢測距離的。但相對于超音波來說,紅外線傳感器具有更高的頻寬。
雷射傳感器
常見的雷射雷達是基于飛行時間的(ToF),透過測量雷射的飛行時間來測距d=ct/2,類似前面提到的超聲測距公式,其中d是距離,c是光速,t是從發射到接收的時間間隔。

比較簡單的方案是測量反射光的相移,傳感器以已知的頻率發射一定幅度的調制光,并測量發射和反向訊號之間的相移,如上圖。
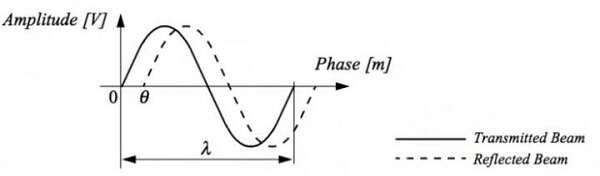
調變訊號的波長為lamda=c/f,其中c是光速,f是調制頻率,測量到發射和反射光束之間的相移差theta之后,距離可由lamda * theta/4pi計算得到,如上圖。
視覺傳感器
常用的電腦視覺方案也有很多種, 比如雙目視覺,基于ToF的深度相機,基于結構光的深度相機等。
基于結構光的深度相機發射出的光會產生相對隨機但又固定的斑點圖樣,光斑打在物體上,因為與攝影機距離不同,被攝影機捕捉到的位置也不相同。先計算斑點與標定的標準圖案在不同位置的偏移,利用攝影機位置、傳感器大小等參數就可以計算出物體與攝影機的距離。

雙目視覺的測距本質上也是三角測距法,由于兩個攝影機的位置不同,就像人的兩只眼睛一樣,看到的物體也不一樣。兩個攝影機看到的同一個點P,在成像的時候會有不同的畫素位置,此時透過三角測距就可以測出這個點的距離。
在「工業4.0」時代,強調自動化與資訊化相互融合,工業機器人作為自動化制造過程的重要參與者,直接影響著工業制造自動化水準。
隨著工業產品復雜程度和精度的要求不斷提高,機器人的應用場所和需求也越來越復雜和嚴苛,機器人的運算平臺已經從傳統的PC平臺、嵌入式平臺擴展到智慧型手機、平板電腦等行動裝置,機器人配備的傳感器從簡單的光電開關、觸碰開關發展到觸覺、聲覺、視覺等高階傳感器,機器人伺服系統與控制系統之間的通訊方式也由原來的「脈沖+方向」通訊線纜,發展到通訊更高效、通訊資料量更大的各種現場匯流排。
機器人控制系統正朝著開放化的方向轉變,工業物聯網、大數據分析以及虛擬化等技術的發展,也使機器人更好地融入制造業應用。
 排插式LoRa轉4G智能網關
排插式LoRa轉4G智能網關
 無線遠程壓力采集終端
無線遠程壓力采集終端
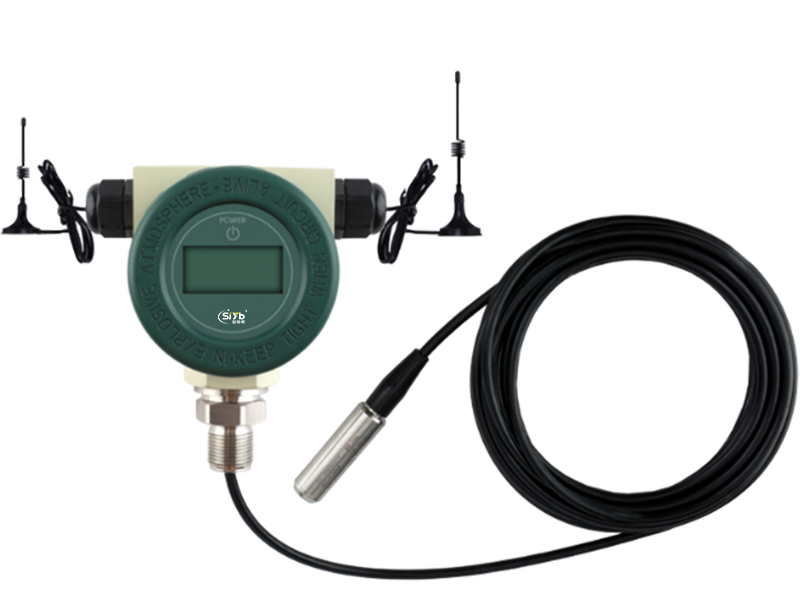 LoRaWAN無線遠程液位傳感器
LoRaWAN無線遠程液位傳感器
 無線智能消防栓水壓監測
無線智能消防栓水壓監測
 GNSS地質災害監測站
GNSS地質災害監測站
 一體化傾斜伏倒檢測儀
一體化傾斜伏倒檢測儀
 地表裂縫監測儀
地表裂縫監測儀
 無線4g傾斜傳感器(內置電池)
無線4g傾斜傳感器(內置電池)
 衛星物聯網傳輸數據采集主機
衛星物聯網傳輸數據采集主機
 智能水位控制器
智能水位控制器
 智能主機環境數據4G采集儀
智能主機環境數據4G采集儀
 S-CGC5低功耗溫濕度監控
S-CGC5低功耗溫濕度監控
 4G噴灌滴灌流量計
4G噴灌滴灌流量計
 土壤熱流計熱通量傳感器
土壤熱流計熱通量傳感器
 有線波載64路閥門集中控制器
有線波載64路閥門集中控制器
 S-PSVF 電池供電4G無線閥門控制
S-PSVF 電池供電4G無線閥門控制
 水位地災拍照雷達一體化水位
水位地災拍照雷達一體化水位
 水中硼線上自動分析儀
水中硼線上自動分析儀
 水中鎳線上分析儀傳感器
水中鎳線上分析儀傳感器
 水質鉻自動分析儀傳感器
水質鉻自動分析儀傳感器
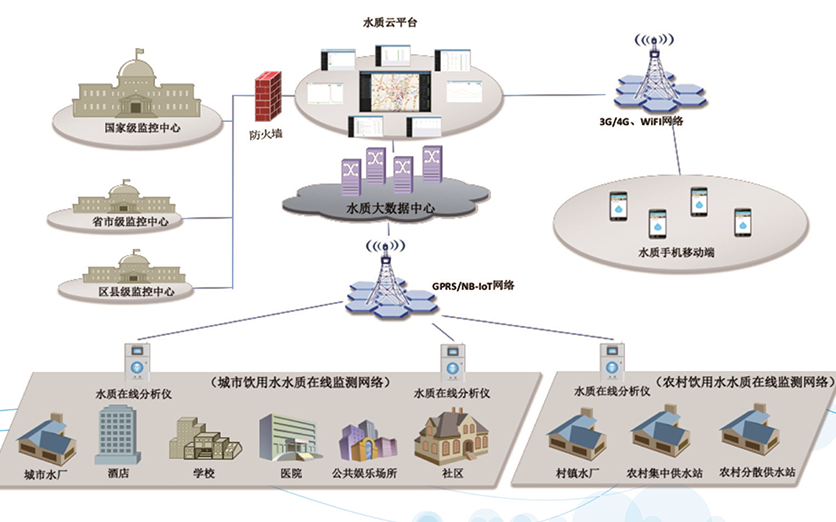 美麗鄉村水質物聯網平臺
美麗鄉村水質物聯網平臺
 智能井蓋管理軟件平臺
智能井蓋管理軟件平臺
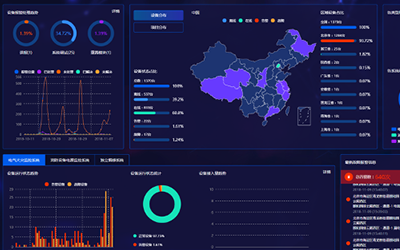
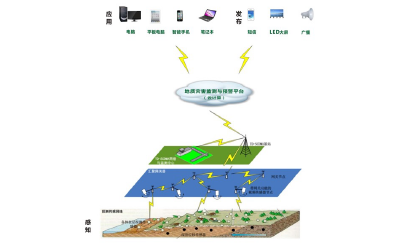 S-DZJC監測與預警服務平臺
S-DZJC監測與預警服務平臺
 負氧離子LED顯示發布系統
負氧離子LED顯示發布系統
 噪音揚塵監測系統
噪音揚塵監測系統
 太陽能供電電流電壓遠程監控
太陽能供電電流電壓遠程監控
 超聲波風速風向,溫濕度,噪聲
超聲波風速風向,溫濕度,噪聲
 水質離子在線傳感器
水質離子在線傳感器


 在線咨詢 9:00-18:00
在線咨詢 9:00-18:00
