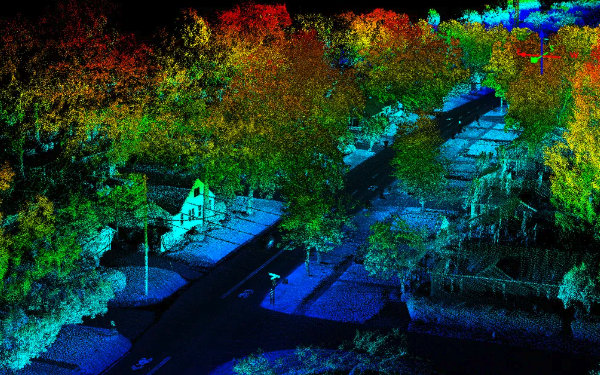
激光雷達傳感器是通過發射激光并檢測反射光和散射光來測量物體距離和形狀的設備的總稱。激光雷達傳感器的LiDAR以“光檢測和測距”的首字母命名,發音為“騎手”。特別是在檢測光時常用于測量飛行時間,也稱為TOF(Time-of-flight)傳感器。此外,利用多普勒效應的頻率連續調制方法也用于高級測量,這種方法被稱為FMCW(頻率調制連續波)方法。這種從遠處測量距離的技術稱為遙感技術。
LiDAR傳感器的使用
目前,LiDAR傳感器通常用于汽車的自動駕駛技術和智能手機的圖像檢測技術,但它是一項歷史技術,最初已在飛機雷達和氣象觀測中使用多年。
近年來,它與 ADAS 一起成為實現汽車中的障礙物和周圍車輛檢測等自動駕駛技術的必要要素,并且正在積極推進小型化、低成本化的開發。
此外,在工廠中,它已開始與圖像處理設備、智能手機相機等結合使用,以在拍照時有效模糊焦點,并作為VR(虛擬現實)和AR(增強現實)的技術。是這樣的情況。此外,它在蘋果 iPhone 12 Pro 和 iPhone 12 Pro Max 中的采用也大大提高了 LiDAR 傳感器的知名度。
激光雷達傳感器原理
激光雷達傳感器的原理是由激光作為光源和光接收元件組成,通過某種物理方法接收發射的激光來測量到物體的距離。例如,在目前最廣泛使用的TOF方法中,將激光束照射到物體上,并測量其通過反射或散射返回所需的時間(飛行時間,TOF) .求距離。
照射激光的方法有兩種:照射寬視場的方法和沿特定方向照射并掃描的掃描方法。
1.廣域照射法
它也被稱為TOF 相機,因為它采用寬視場照射方法,因此可以像普通相機一樣使用。 TOF相機只需單次光照射即可一次性獲取整個視場的信息,而且光學系統極其簡單,因此設備成本相對較低。
但由于激光束需要擴散以覆蓋整個傳感器,因此存在的問題是每個像素的光子密度下降,而且缺點是容易受環境光影響、測量距離短等。
2、掃描方式
另一方面,掃描方法使用鏡子來掃描激光束。有掃描每個像素的點掃描方法和掃描每行的線掃描方法。前一種方法精度高,但需要較長的測量時間,因此當不需要高空間分辨率時,采用具有相反特性的線掃描方法。
有關 LiDAR 傳感器的其他信息
1. TOF法與FMCW法的區別
LiDAR傳感器有兩種檢測方法:TOF(飛行時間)和FMCW(連續頻率調制),但主要區別在于距離檢測方法中使用的物理量。 TOF 方法通過測量激光以脈沖照射物體并反射回來所需的時間來測量距離,但在 FMCW 方法中,當在改變頻率的同時照射連續波時,可以使用以下方法來測量長度:來自目標物體的反射波的多普勒效應。
TOF方法原理上更簡單,可以降低激光雷達傳感器的成本。然而,由于很難區分照射到物體上的激光束是由你還是其他人發出的,因此不太可能成為當前自動駕駛技術的首選技術,需要更先進的測量。一種可能的 FMCW 方法是表現出承諾。
FMCW方法在實現自動駕駛方面還存在需要克服的問題,例如限制測量距離和降低成本的相干性問題,但為了克服這些問題,主要是世界各地的研究機構正在開展更先進的研究和開發。積極開展。
2. 激光雷達傳感器攝像頭
LiDAR 傳感器和攝像頭通常是分開的。然而,如果LIDER傳感器和相機是獨立的單元,當LiDAR傳感器和相機數據結合時會出現輕微的視差,從而無法實現高精度。因此,出現了一種將攝像頭和激光雷達傳感器合二為一的傳感器。
使用這種類型的傳感器,可以通過結合相機和 LiDAR 傳感器數據來生成高分辨率 3D 圖像。此外,由于它能夠實現無視差和畸變差異的高精度測量,因此有望用作車載傳感器。
3、激光雷達傳感器需求預測
近來,以豐田汽車為首的自動駕駛技術研發活躍,激光雷達傳感器和激光產業也隨之升溫。
市場研究公司矢野研究所預測,到2030年,LiDAR傳感器和激光器的市場規模將增至4959億日元。此外,另一家市場研究公司Youl Development(在2019年的研究中)宣布,到2024年,LiDAR傳感器的市場規模將擴大到60億美元。
預計未來對激光雷達傳感器的需求將繼續增加,特別是在發達國家。
聲明:凡來源標明“欣仰邦”的文章版權均為本站所有,如需轉載請務必注明出處,違者本網將追究相關法律責任;
所有未標明來源為“欣仰邦”的轉載文章目的在于傳遞更多信息,均不代表本網立場及觀點,
“欣仰邦”不對這些第三方內容或鏈接做任何保證或承擔任何責任;
如涉及版權等問題,請在內容發表之日起一周內與本網聯系,否則視為放棄相關權利。


 排插式LoRa轉4G智能網關
排插式LoRa轉4G智能網關
 無線遠程壓力采集終端
無線遠程壓力采集終端
 LoRaWAN無線遠程液位傳感器
LoRaWAN無線遠程液位傳感器
 無線智能消防栓水壓監測
無線智能消防栓水壓監測
 GNSS地質災害監測站
GNSS地質災害監測站
 一體化傾斜伏倒檢測儀
一體化傾斜伏倒檢測儀
 地表裂縫監測儀
地表裂縫監測儀
 無線4g傾斜傳感器(內置電池)
無線4g傾斜傳感器(內置電池)
 衛星物聯網傳輸數據采集主機
衛星物聯網傳輸數據采集主機
 智能水位控制器
智能水位控制器
 智能主機環境數據4G采集儀
智能主機環境數據4G采集儀
 S-CGC5低功耗溫濕度監控
S-CGC5低功耗溫濕度監控
 4G噴灌滴灌流量計
4G噴灌滴灌流量計
 土壤熱流計熱通量傳感器
土壤熱流計熱通量傳感器
 有線波載64路閥門集中控制器
有線波載64路閥門集中控制器
 S-PSVF 電池供電4G無線閥門控制
S-PSVF 電池供電4G無線閥門控制
 水位地災拍照雷達一體化水位
水位地災拍照雷達一體化水位
 水中硼線上自動分析儀
水中硼線上自動分析儀
 水中鎳線上分析儀傳感器
水中鎳線上分析儀傳感器
 水質鉻自動分析儀傳感器
水質鉻自動分析儀傳感器
 美麗鄉村水質物聯網平臺
美麗鄉村水質物聯網平臺
 智能井蓋管理軟件平臺
智能井蓋管理軟件平臺
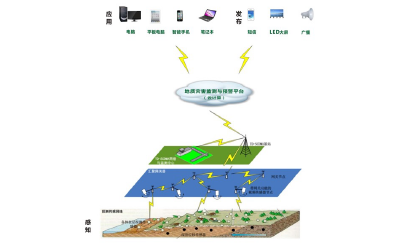 S-DZJC監測與預警服務平臺
S-DZJC監測與預警服務平臺
 負氧離子LED顯示發布系統
負氧離子LED顯示發布系統
 噪音揚塵監測系統
噪音揚塵監測系統
 太陽能供電電流電壓遠程監控
太陽能供電電流電壓遠程監控
 超聲波風速風向,溫濕度,噪聲
超聲波風速風向,溫濕度,噪聲
 水質離子在線傳感器
水質離子在線傳感器


 在線咨詢 9:00-18:00
在線咨詢 9:00-18:00
